Objeto global, onde WordPress mapeia os hooks: $GLOBALS['wp_filter']
ref: http://stackoverflow.com/questions/26836720/cant-remove-function-from-wordpress-woocommerce-hook-using-remove-action
unset( $GLOBALS['wp_filter'][ $tag ][ $priority ][ $function_to_remove ]Tag: Development
Panda3D gamedev tutorial 4
Neste tutorial, iremos trabalhar com simulações simples de física. O Panda3D possui uma pequena engine de física, que serve para simulações simples. Usaremos ela para melhorar o deslocamento do nosso personagem, e implementar um salto. Também veremos o uso de Intervals no Panda3D.
Esse tutorial tem por objetivo mostrar como usar, de maneira simplificada, uma engine de física. Caso você tenha interesse em utilizar o ODE no Panda, veja este pequeno tutorial, também lhe será útil: http://paulobarbeiro.com.br/blog/?p=77
Para começar com uma má notícia… boa parte do que foi feito até o momento nos tutoriais anteriores, principalmente o que foi feito para movimentar o avatar, não servirá para as simulações de física, logo vamos jogar, no lixo! 🙂 Isso lhe servirá como uma lição: Não se apegue a seu código! 😀 E pense bem, se irá usar simulações de física ou não, porque os códigos não serão reaproveitáveis.
O trabalho será meio longo. E antes de começarmos com códigos vamos explorar um pouco de teoria, e para ter uma “visão panorâmica” do que iremos fazer.
Engines de Física ——————-
Engines de física, são softwares dedicados a realizar cálculos de física, geralmente física Newtoniana, para diversos tipos de aplicações, sendo games uma das possibilidades.
Essas engines de física tem um único trabalho: calcular física. Sim, só isso! Engines de física não fazem renderizações, não capturam inputs de usuário, não fazem síntese sonora, elas apenas calculam valores, com base em fórmulas de física.
Dentro dessas fórmulas, encontra-se muitas opções, entre elas: as três leis de Newton, molas, juntas, colisões… etc. Cada engine de física, possui suas implementações de fórmulas. Cabe a você escolher qual engine usar, baseando-se no que cada uma oferece.
Bem, sendo que uma engine de física, apenas faz cálculos, talvez você esteja se perguntando, como elas são usadas em games?
Até o presente momento, nessa série de tutoriais, nós realizamos as movimentações de nosso personagem, modificando sua posição de coordenadas a cada frame do jogo. Ou seja, para que o avatar se desloca-se para a direita, nós incrementamos sua coordenada X a cada frame, e isso é o suficiente para dar uma ilusão de deslocamento. Essa é uma abordagem plenamente possível, e utilizada em muito jogos! Não há nada de errado nisso! Porém essa movimentação, feita dessa forma, ignora, por exemplo, uma reação natural a certas forças da natureza, como a gravidade. Qualquer um que olhar nosso jogo até o presente momento, irá reparar que o avatar cai a uma velocidade constante, e isso não é um comportamento natural em nosso universo.
E para muitos tipos de jogos, buscar essa naturalidade faz parte da diversão!
Usar simulações de física é um primeiro passo para buscar realismo nos jogos. Isso é uma busca que muda de jogo para jogo. Em alguns casos o realismo pode estragar completamente o jogo!
Então, quando utilizamos engines de física, nós deixamos de manipular as coordenadas os objetos! Quando se usa simulação de física, temos que pensar os movimentos, como reação a aplicação de forças sobre os objetos. Ou seja, para que um objeto se mova para a direita, ao invés de modificar suas coordenadas, temos que aplicar uma força nesse objeto, para fazer com que ele se mova para a direita. Todo o resto fica por conta da engine de física. O que irá determinar a forma do movimento, serão os resultados dos cálculos de simulação de física. Tudo que temos de fazer, é calibrar a aplicação das forças ao nosso gosto!
Pensar o movimento sobre a óptica da aplicação de forças físicas, não é complicado. Mas nos exige um pequeno conhecimento sobre forças e sua representação matemática, os vetores. Todos já estudaram isso nas aulas de física na escola, basta relembrar, e utilizar de uma forma muito mais divertida! Aqui tem um link que pode ajudar um pouco.
Há uma quantidade bem grande de explicações sobre vetores, cálculos vetorias, forças e forças vetoriais pela internet como um todo. Caso o link não lhe ajude, busque pela internet.
Agora, sabemos conceitualmente como as engines de física funcionam. Agora vamos pensar conceitualmente como isso se aplicaria ao nosso game.
Até o presente momento, temos movimentos em três direções, à direita, à esquerda, e para baixo. Então, para que nosso avatar se desloque temos que aplicar forças nele, ou seja:
– para baixo: teremos a força da gravidade;
– para direita: uma força que o empurre para direita;
– para esquerda: uma força que o empurre para a esquerda.
E caso queiramos um salto, teremos uma força que empurre nosso avatar para o alto! Veja o diagrama abaixo:
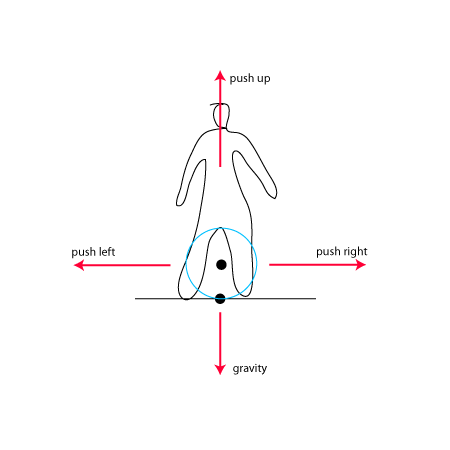
Nesse diagrama também temos os valores vetoriais para cada uma dessas forças. Esses valores vetoriais, representam a direção e intensidade da força. Por exemplo, a gravidade: Vec3(0,0,-9.81).
Esses três valores que forma o vetor, são coordenadas x,y,z. No caso da gravidade, x=0, y=0, e z=-9.81, ou seja, ela é uma força que aponta para baixo, com intensidade 9.81. Neste tutorial todas as forças são bem simples: apontam para direções nos eixos x, y, ou z, veja as outras:
– pushRight: Vec3(10,0,0): aponta para a “direita” (x positivo), intensidade 10
– pushLeft: Vec3(-10,0,0): aponta para a “esquerda” (x negativo), intensidade 10
– pushUp: Vec3(0,0,20): aponta para cima (z positivo), intensidade 20
O que nós faremos no nosso código, é uma implementação a engine de física do Panda3D, que irá aplicar essas forças em nosso avatar, de acordo com os inputs do usuário. Durante o processo, veremos a implementação dos elementos necessários, e problemas de lógica que teremos de achar soluções.
Essa engine de física que usaremos, é “embutida” no Panda3D, ela é muito simples, e com poucos recursos se comparada a outras engines de física, mas possui o que precisamos para nosso jogo. Devido a essas limitação, os desenvolvedores do Panda3D, também implementaram uma outra engine de física, a ODE (Open Dynamics Engine) um software já consagrado. Mas nada impede que outras engines sejam usadas. Outra possibilidade, é a PhysX, também implementada por alguns usuários!
Vamos aos passos iniciais. No arquivo Panda-tut-00.py, não teremos grandes modificações. Nesse arquivo principal, temos que importar e iniciar o PhysicsCollisionHandler, que será o grande responsável pela detecção de colisões, nesse caso, utilizando a simulação de física do Panda3D.
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
import direct.directbase.DirectStart
from pandac.PandaModules import *
from direct.task.Task import Task
from direct.showbase.DirectObject import DirectObject
from avatar import Avatar
#game class
class Game(DirectObject):
def __init__(self):
#init collider system
traverser = CollisionTraverser()
base.cTrav = traverser
base.cTrav.setRespectPrevTransform(True)
base.pusher = CollisionHandlerPusher()
base.pusher.addInPattern(“%fn-into-%in”)
base.pusher.addOutPattern(“%fn-out-%in”)
base.physics = PhysicsCollisionHandler()
base.physics.addInPattern(“%fn-into-%in”)
base.physics.addOutPattern(“%fn-out-%in”)
base.enableParticles()
#load platform model
self.plataforma = loader.loadModel(“../assets/eggs/plataformaBase”)
self.plataforma.reparentTo(render)
self.plataforma.setPos(0,10,0)
#load background sky
self.wall = loader.loadModel(‘../assets/eggs/papelParede’)
self.wall.reparentTo(render)
self.wall.setScale(1)
self.wall.setPos(-5, 30, -2)
#avatar
avatar = Avatar()
avatar.setCollision(traverser)
game = Game()
run()
[/code]
Observe que nesse código, apenas adicionamos as linhas 24, 25, 26 e 27. O PhysicsCollisionHandler funciona de forma muito semelhante aos outros “collision handlers”, a maior diferença é a obrigatoriedade de se ativar o sistema de partículas (linha 27).
As linhas relativas ao CollisionHandlerPusher, podem ser apagadas, elas não possuem mais uso, só as mantenho lá, para que você possa comparar.
Agora na classe Avatar, teremos grandes modificações! Vou colocar todo o código abaixo, e depois seguir nas explicações de cada alteração.
código classe avatar
[code lang=”python”]
from direct.showbase.DirectObject import DirectObject
from direct.actor.Actor import Actor
from direct.task import Task
from pandac.PandaModules import *
from direct.interval.IntervalGlobal import *
#modulo da classe Avatar
class Avatar(DirectObject):
def __init__(self):
self.persona = render.attachNewNode(‘persona’)
self.personaActorNode = ActorNode(‘personaActorNode’)
self.personaActorNode.getPhysicsObject().setMass(35)
self.personaActorNP = self.persona.attachNewNode(self.personaActorNode)
base.physicsMgr.attachPhysicalNode(self.personaActorNode)
self.personaActor = Actor(‘../assets/eggs/personagem.egg’,
{‘idle’:’../assets/eggs/personagem-parado’,
‘run’ :’../assets/eggs/personagem-correr’,
‘jump’:’../assets/eggs/personagem-pular’}
)
self.personaActor.setScale(1)
self.personaActor.setPos(0,0,5)
self.personaActor.reparentTo(self.personaActorNP)
self.persona.setPos(0,10,10)
self.persona.setScale(.15)
self.persona.setH(90)
self.state = { ‘left’ :False,
‘right’ :False,
‘ground’:False,
‘canJump’ :False
}
taskMgr.add(self.movement, “Avatar Movement”)
#timer for jump
self.startCallforJump = 0
self.timer = LerpFunc(self.performJump,
fromData = 0,
toData =1,
duration = 0.25,
blendType=’easeIn’,
extraArgs=[],
name=None)
#capture keyboard events
self.accept(‘arrow_left’, self.changeState, [‘left’,True])
self.accept(‘arrow_left-up’, self.changeState, [‘left’,False])
self.accept(‘arrow_right’, self.changeState, [‘right’,True])
self.accept(‘arrow_right-up’, self.changeState, [‘right’,False])
self.accept(‘space’, self.changeState,[‘jump’,True])
self.accept(‘space-up’, self.changeState,[‘jump’,False])
#capture collision events
self.accept(‘bola0CN-into-plataforma’, self.changeState, [‘ground’,True ])
self.accept(‘bola0CN-out-plataforma’, self.changeState , [‘ground’,False])
#Persona physics forces
self.pushUp=LinearVectorForce(0,0,20)
self.pushUpFN = ForceNode(‘pushup-force’)
self.pushUpFNP = render.attachNewNode(self.pushUpFN)
self.pushUpFN.addForce(self.pushUp)
self.pushLeft=LinearVectorForce(-10,0,0)
self.pushLeftFN = ForceNode(‘pushleft-force’)
self.pushLeftFNP = render.attachNewNode(self.pushLeftFN)
self.pushLeftFN.addForce(self.pushLeft)
self.pushRight=LinearVectorForce(10,0,0)
self.pushRightFN = ForceNode(‘pushright-force’)
self.pushRightFNP = render.attachNewNode(self.pushRightFN)
self.pushRightFN.addForce(self.pushRight)
self.gravityFN=ForceNode(‘world-forces’)
self.gravityFNP=render.attachNewNode(self.gravityFN)
self.gravityForce=LinearVectorForce(0,0,-9.81) #gravity acceleration
self.gravityFN.addForce(self.gravityForce)
base.physicsMgr.addLinearForce(self.gravityForce)
def setCollision(self, trav):
#colision nodes and solids
self.ball0 = CollisionSphere(0,0,1.5,1.5)
self.ball0NP = self.personaActorNP.attachNewNode(CollisionNode(‘bola0CN’))
self.ball0NP.node().addSolid(self.ball0)
self.ball0NP.show()
base.physics.addCollider(self.ball0NP, self.personaActorNP)
base.cTrav.addCollider(self.ball0NP, base.physics)
def movement(self, task):
#print self.personaActorNode.getPhysical(0).getLinearForces()
if(self.state[‘left’] == True):
if(len(self.personaActorNode.getPhysical(0).getLinearForces()) == 0):
self.personaActorNode.getPhysical(0).addLinearForce(self.pushLeft)
else:
self.personaActorNode.getPhysical(0).removeLinearForce(self.pushLeft)
if(self.state[‘right’] == True):
if(len(self.personaActorNode.getPhysical(0).getLinearForces()) == 0):
self.personaActorNode.getPhysical(0).addLinearForce(self.pushRight)
else:
self.personaActorNode.getPhysical(0).removeLinearForce(self.pushRight)
return Task.cont
def changeState(self, key, value, col=None):
if(self.state[‘canJump’] == True and key == ‘jump’):
if(value==True):
self.startCallForJump = globalClock.getRealTime()
if(value == False):
preparationTime = globalClock.getRealTime() – self.startCallForJump
if (preparationTime > 0.4): preparationTime = 0.4
elif(preparationTime < 0.2): preparationTime = 0.2
upforce = 1000*preparationTime
self.pushUp.setVector(0,0,upforce)
self.timer.start()
self.startCallForJump = 0
else:
self.state[key] = value
if(self.state[‘ground’] == True):
self.state[‘canJump’]=True
elif(self.state[‘ground’] == False):
self.state[‘canJump’]=False
def performJump(self, data):
if(data == 0):
self.personaActorNode.getPhysical(0).addLinearForce(self.pushUp)
elif(data == 1):
self.personaActorNode.getPhysical(0).removeLinearForce(self.pushUp)
[/code]
Vamos começar pela função __init__(self):
A primeira alteração é adicionar aos nodes e nodepaths que compõe nosso avatar, um ActorNode. O ActorNode é uma classe para um nó que interage com o sistema de física. Não confunda com a classe Actor, destinada à utilização de modelos “riggados”. Primeiro nós criamos o ActorNode (linha 5), configuramos a massa do nosso objeto; Adicionamos o ActorNode ao persona node; e o nodepath do ActorNode, dentro do persona node, é adicionado ao handler physics.
Observe outro detalhe importante na linha 17: O node personaActor, com o modelo do personagem, passa a ser ligado ao ActorNode. É essa ligação que fará com que o modelo, se movimente pela tela com as simulações de física.
Nas linhas 32 e 32, temos uma pequena lógica para realizar um salto. Veremos esse processo com mais detalhes em breve.
Nas linhas 46 e 47, temos uma captura de input de usuário com a tecla de espaço.
Das linhas 52 à 71, temos a configurações das forças que atuarão sobre nosso personagem, que discutimos anteriormente. E na linha 71, em especial vemos como fazer a aplicação da força ao ActorNode, no caso, a única força que será onipresente, a gravidade!
A criação dessas forças, é feita coma criação de um vetor de força, no caso, LinearVectorForce, que contém a direção e intensidade da força em questão. Com o LinearVectorForce criado, temos que criar um ForceNode, que será anexado ao render. Nesse momento, as forças ficam disponíveis para uso, basta aplicá-las.
A função setCollision:
Neste função temos poucas alterações, a única diferença é a necessidade, óbvia, de ligar os collisionNodes ao PhysicsCollisionHanlder.
A função movement:
Na função movement, temos a lógica que realiza o movimento do personagem aplicando as forçar apropriadas. Basicamente quando o estado do personagem muda para a direita ou esquerda, a função aplica e remove as forças, para que a simulação represente o que desejamos. Os comando addLinearForce() e removeLinearForce(), são bem auto-explicativos, não?
A função changeState:
Na função changeState temos uma lógica especial para a realização do salto do avatar.
Primeiro, o objetivo dessa função é filtrar o input de usuário pela tecla de espaço, para a realização do salto. O “filtro” consiste em realizar um salto mais forte, ou mais fraco, dependendo do tempo que o jogador pressiona a tecla de espaço.
Quando a barra de espaço é pressionada, a função avalia se o avatar pode saltar(canJump), ou seja, se ele está tocando a plataforma. Então ele avalia se a tecla de espaço foi pressionada ou desapertada; Se foi apertada, a função guarda o tempo em que ela foi apertada; Quando a tecla for solta, a função calcula o tempo em que ela ficou pressionada, e divide esse valor de 1000, o resultado é aplicado ao vetor de forca linear self.pushUp, e um timer é ativado, que executa a aplicação e remoção da força.
A função performJump:
Essa função é uma LerpFunction, declarada na linha 40, na função __init__. Essa função ira realizar uma espécie de timer, que usaremos para aplicar a força do salto, e bem pouco tempo depois, remover essa força. Um salto de uma humano, ou outro animal terrestre, é basicamente um único impulso bem forte, e não uma aplicação constante de força. Logo, para simular um salto humano, temos que fazer isso, uma aplicação de força em um curtíssimo período de tempo.
Panda3D gamedev tutorial 1
Este é o primeiro post de uma série falando sobre desenvolvimento de jogos com Panda3D (versão 1.6).
Minha idéia é uma introdução sobre desenvolvimento de jogos, e eu escolhi o Panda3D como game engine, porque é um ótimo software, livre e multi-plataforma.
Antes de começar a seguir esses tutoriais, você precisa baixar uns arquivos, e seguir umas instruções para organizar as pastas dos arquivos. Acesse aqui.
O objetivo desse tutorial é fazer um jogo super simples: Uma garota, em um cenário futurista, tem que passar por umas barreiras e armadilhas.
Bueno… espero que vc já tenha o Panda3D 1.6.2 instalado, caso contrário, acesse www.panda3d.org e instale-o.
… vamos começar.
Para começar a escrever código do Panda3D, você precisa de um editor de texto simples, Microsoft Word ou Open Office Writer não servem!
Caso você trabalhe com Linux, Gedit é muito bom!
Caso você trabalhe com Mac, Xcode até dá… mas não é o melhor…
Caso você trabalhe com Windows, tente o Notepad++
Mas para todos eu sugiro o Eclipse com plugin de python (você pode usar o Eclipse for PHP), ele é um pouco difícil de configurar, mas vale o esforço.
Com tudo pronto, vamos digitar um código. Comece um novo arquivo, nomeie-o como Panda-tut-00.py, e vamos colocar o seguinte código:
[code lang=”python”]
import direct.directbase.DirectStart
run()
[/code]
Esse é o código mais simples que podemos fazer e ter o Panda3D funcionando!
A primeira linha importa a classe DirectStart, que define algumas configurações e inicia o sistema do Panda3D.
A linha run(), basicamente inicia o ‘main loop’ do Panda3D. Todo jogo precisa de um ‘main loop’. O main loop, é a mágica que nos fornece o “Frame”! Graças aos “frame por segundo”, podemos mudar o posicionamento dos objetos do jogo, durante o tempo, e assim a mágica acontece.
Para executar esse código, você precisa:
Caso você trabalhe com Linux (você já sabe oq fazer, eu sei…), navegue pelo Terminal até a pasta Panda-project/src, e execute: python Panda-tut-00.py
Caso você trabalhe com Mac (eu acho que você sabe oq fazer…), navegue pelo Terminal até a pasta Panda-project/src, e execute: python Panda-tut-00.py
Caso você trabalhe com Windows (ohh… Deus, que o Senhor tenha piedade de sua alma!)… Você precisará lembrar como navegar pelas pastas do seu sistema pelo Prompt de Comando, usando o comando ‘cd’. Para abrir o prompt de commando, vá ao menu iniciar, e na pesquisa digite “command”, e então navegue até a pasta Panda-project/src, e execute: python Panda-tut-00.py
Esse é o processo de como rodar as todos os códigos feitos para o Panda3D, decore!
Ok… vamos começar de verdade!
Vamos a um código de verdade, o anterior foi só para preparar alguma base. Vamos carregar para o jogo uma arena, e um plano de fundo:
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
import direct.directbase.DirectStart
from pandac.PandaModules import *
from direct.task.Task import Task
from direct.showbase.DirectObject import DirectObject
#game class
class Game(DirectObject):
def __init__(self):
#load platform model
self.plataforma = loader.loadModel(“../assets/eggs/plataformaBase”)
self.plataforma.reparentTo(render)
self.plataforma.setPos(0,10,0)
#load background sky
self.wall = loader.loadModel(‘../assets/eggs/papelParede’)
self.wall.reparentTo(render)
self.wall.setScale(1)
self.wall.setPos(-5, 30, -2)
game = Game()
run()
[/code]
Ao rodar o programa você verá algo assim:

LEMBRANDO: Isto é um código para computadores, nenhum erro de digitação é tolerado. Uma única letra errada, causará um erro. Outro erro bem comum é quando o Panda3D não encontra os arquivos que estamos carregando para o jogo, isso geralmente acontece se vc digitar o endereço dos arquivos errado, ou se não organizou os arquivos de forma correta… dá uma lida aqui.
O que nós fizemos:
1 – Tá vendo aquele número no canto superior direito da tela? São nossos frames por segundo! essas duas primeiras linhas são responsáveis por ele aparecer alí:
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
[/code]
2 – Agora pedimos ao Panda3D, algumas das ferramentas que ele tem disponível para trabalhar. O Panda3D, é um conjunto de muitas ferramentas para desenvolvimento de games, e não precisamos de todas a todo momento, então pedimos essas ferramentas na medida que as usamos:
[code lang=”python”]
import direct.directbase.DirectStart
from pandac.PandaModules import *
from direct.task.Task import Task
from direct.showbase.DirectObject import DirectObject
[/code]
3 – Como somos pessoas do bem, criaremos nosso jogo com “programação orientada a objetos”, isso quer dizer que cada objeto de nosso jogo será criado com um conjunto de código separado dos outros. E para começar, nossa própria lógica do jogo será um objeto em sí, e escreveremos uma classe para ela:
[code lang=”python”]
class Game(DirectObject):
def __init__(self):
self.platforma = loader.loadModel(“../assets/eggs/plataformaBase”)
self.platforma.reparentTo(render)
self.platforma.setPos(0,10,0)
self.wall = loader.loadModel(‘../assets/eggs/papelParede’)
self.wall.reparentTo(render)
self.wall.setScale(1)
self.wall.setPos(-5, 30, -2)
[/code]
4 – Finalmente, instanciamos nossa classe do jogo, e executamos o main loop:
[code lang=”python”]
game = Game()
run()
[/code]
Ponto crucial
Nesse momento vamos falar sobre o que esta acontecendo dentro da classe Game. A classe Game é inicializada na função def __init__(self):
Esse função é executada uma única vez quando o objeto é instanciado(trocando em miúdos, quando ele é criado), e nessa função nós mandamos o Panda3D configurar alguns elementos do jogo: a arena e o plano de fundo. Vejamos o exemplo da plataforma.
Primeiramente pedimos ao Panda3D para importar o modelo “plataformaBase”, e armazenar o ‘caminho’ para esse modelo na variável self.plataforma.
Porque esse é um ponto crucial?? Primeiro porque esse é o passo mais básico para carregar qualquer modelo para sua cena, mas mais importante que isso, precisamos entender esse tal de “render”.
O “render” é o nó raiz do grafo de cena do Panda3D! Essa explicação foi suficiente pra você? Ótimo! Pule para o próximo capítulo. Se a definição não lhe serviu, preste atenção na explicação.
Primeiro, o que é um grafo de cena? Um grafo de cena é uma forma estruturada de se organizar elementos em um ambiente gráfico.
Quase todos os softwares gráficos que conheço usam um grafo de cena. Basicamente um grafo de cena, possui um ‘nó’ principal, que aponta para outros elementos que apareceram na cena. Essa forma estruturada serve para otimizar trabalho do sistema de renderização, comunicação entre objetos da cena, collisões, etc… Dê uma olhada nesse link, e nesse também!
Qualquer objeto que tenha que aparecer na cena, precisa estar lincado, direta ou indiretamente ao grafo de cena. Um objeto pode se linkar ao gafo diretamente, ou a outro objeto que já esteja linkado.
Cada elemento adicionado ao grafo de cena, temos um nó (node) e um caminho (nodepath). O nó é criado no grafo de cena, e o caminho para o nó (nodepath), é alocado na variável do código python. ‘Nós’ e ‘caminho de nós’ (nodepaths), não são a mesma coisa, mas no Panda3D, nodepaths são muito mais usados do que os nós propriamente ditos. Então, quando o código diz: self.plataforma = load.loadModel(“../assets/eggs/plataformaBase”), o Panda3D, carrega o modelo 3D, cria um nó para o grafo de cena, salva o nodepath na variável self.plataforma.
Posteriormente, para que o objeto seja visível, é necessário linkar seu nó, ao ‘render’: self.plataforma.reparentTo(render).
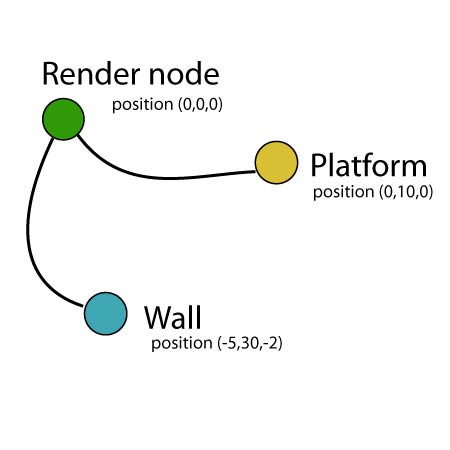
Bem, o render é o nó principal desse grafo de cena, logo é o centro, o ponto de origem do sistema de coordenadas do Panda3D. Então, após importar o modelo, e linkar ao grafo, podemos posicioná-lo na cena: self.plataforma.setPos(0,10,0)
Esse processo se repetirá por todos os elementos que quisermos colocá-lo na cena. Então ao fim desse código teremos, uma estrutura com essa aparência:
SUGESTÃO: brinque com as posições dos objetos, e com seus links:
– altere os valores das cooredenadas tanto da plataforma, quanto do wall, para entender melhor os valores;
– link o wall, à plataforma: self.wall.reparentTo(self.plataforma);
– brinque com as coordenadas;
– linke a plataforma ao wall, e modifique as coordenadas.
Isso lhe ajudará a entender melhor essas coisas no Panda3D.
This is the first post about game development in Panda3D. (version 1.6)
My idea is to introduce people in game development, I have chosen Panda3D as game engine, because it is a great software, free and multi-platform.
In order to start following these tutorials, you will need to download some files, and follow some instructions about how organize the files. Here is the link.
The goal here is to build a very simple game: A girl, in a futuristic scenario, who needs to avoid some barriers and traps.
I hope you already have Panda3D 1.6.2, otherwise, go to www.panda3d.org, download and install it. (There is some issue with MacOSX version, check forum to find solutions)
… let’s start.
To start writing Panda3D code all you need is a simple text editor, Microsoft Word or Open Office Writer do not work for this!
In case you work on Linux, Gedit is great!
In case you work on Mac, Xcode is… is ok, but…
In case you work on Windows, you should try Notepad++
But for all, I suggest Eclipse with python plugin (you can download Eclipse for PHP), it is a bit hard to setup, but it worth the effort.
So… if you are ready, let’s go and write some code. Start a new file, we could name it as Panda-tut-00.py, and write the following code:
[code lang=”python”]
import direct.directbase.DirectStart
run()
[/code]
This is the most simple code we can write to test if Panda3D is working!
The first line imports the DirectStart class, that starts Panda3D basic systems, and creates the screen where our game is gonna happened.
The line run(), basically starts the Panda3D main loop. Every game needs a main loop. The main loop, is a magical stuff that will give our game the “Frames”! And thanks for the frames per second, we can change game objects position in time, and all the magic is possible.
In order to run this simple code you have to:
In case you work on Linux (you know what to do, but…), you go to the Terminal, navigate to Panda-project/src folder, and run: python Panda-tut-00.py
In case you work on Mac (I think you know what to do…), you go to the Terminal, navigate to Panda-project/src folder, and run: python Panda-tut-00.py
In case you work on Windows (ohh… dear Lord, that God have mercy of your soul!)… You need to remember how to navigate using the Command Prompt, and the command ‘cd’. To start Command Prompt, go to Start menu >> All Programs >> Accessories >> Command Prompt, and navigate till the Panda-project/src folder, and run the command: python Panda-tut-00.py
…and that’s how you are gonna run and test, all our codes! You must know this process by heart!
Ok… let’s start for real!
Let’s start a real code… the previous was just to lay down some basis. Let’s start loading our scenario, our arena:
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
import direct.directbase.DirectStart
from pandac.PandaModules import *
from direct.task.Task import Task
from direct.showbase.DirectObject import DirectObject
#game class
class Game(DirectObject):
def __init__(self):
#load platform model
self.platform = loader.loadModel(“../assets/eggs/plataformaBase”)
self.platform.reparentTo(render)
self.platform.setPos(0,10,0)
#load background sky
self.wall = loader.loadModel(‘../assets/eggs/papelParede’)
self.wall.reparentTo(render)
self.wall.setScale(1)
self.wall.setPos(-5, 30, -2)
game = Game()
run()
[/code]
After running this code, you should see some thing like this:
JUST TO REMEMBER: this is a computer code, so, none errors in typing are tolerated. One single wrong letter, might cause an error. Also, another common error occurs when Panda3D do not find the models, we are asking him to bring to the game! So… follow the instructions here.
Let’s see what we have done:
1 – Are you seeing that little number on top-right corner? Those are your frames per second! and the first two lines are responsible for it to appear:
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
[/code]
2 – Now we need to inform Panda3D, which “parts” of it we need for the job. Panda3D is very big tool, and we don’t need all of it’s parts all the time… so we are asking it to give us some of it’s tools:
[code lang=”python”]
import direct.directbase.DirectStart
from pandac.PandaModules import *
from direct.task.Task import Task
from direct.showbase.DirectObject import DirectObject
[/code]
3 – As we are good people, we will create our code using object oriented programming, it means that all our game objects will be created in deferent parts of code. To start with our own game logic, will be and object itself, for that we define a class for it:
[code lang=”python”]
class Game(DirectObject):
def __init__(self):
self.platform = loader.loadModel(“../assets/eggs/plataformaBase”)
self.platform.reparentTo(render)
self.platform.setPos(0,10,0)
self.wall = loader.loadModel(‘../assets/eggs/papelParede’)
self.wall.reparentTo(render)
self.wall.setScale(1)
self.wall.setPos(-5, 30, -2)
[/code]
4 – We must instantiate our game class, into an object, and run it:
[code lang=”python”]
game = Game()
run()
[/code]
Crucial point
At this point we must talk about what is going on inside the class Game. The Game class has an initialize function def __init__(self):
This function is called once when the object is been instantiated, so inside this function, we write all the code we need to set up or game object. At the moment, we just brought to the game our arena and a background. Let’s watch the self.platform.
First we tell Panda3D to load the “plataformaBase” model, and put it’s path into self.platform variable. Than, we reparent the platform to the ‘render’, and finally we give platform a position.
Why this is a crucial point? First because this is the basic step, to load whatever you want into the game. But above that, we must understand what is this ‘render’?
The ‘render’ object is Panda3D scene graph’s top node! Was that explanation enough for you? Greate! Skip to the next chapter. If that definition wasn’t enough for you, pay attention to the explanation.
First of all, what is a scene graph? A scene graph is a structure to organize hierarchically the elements of a scene.
Almost all graphic softwares I know use a scene graph. Basically a scene graph starts with a main object, which points to other objects that are included into the scene. Such structure is used to optimize rendering processes, comunications among elements, collisions, etc. Take a look at this link, and this one!
Basically any object we want to appear in the game scene, must be some how linked to the scene graph. This object can be linked straight to the “render” node, or linked to an object which must be linked to “render”.
Each element we add to the scene graph, we create a Node and a NodePath. The node is created into the scene graph, and the path to this node (nodepath) is stored into a variable we name, in python code. Node and nodepaths, are not the same thing, but in Panda3D, nodepaths are much more used than the node itself. So, when the code says : self.platform = loader.loadModel(“../assets/eggs/plataformaBase”), Panda3D, loads a model, and creates a scene graph node, and save a path to this node in the self.platform variable.
Latter, in order to make this model visable, it’s necessary to link this new node to the render: self.platform.reparentTo(render).
Well, the “render” is the top node on Panda3D scene graph, and it is the center, the origin point of Panda3D’s coordinates system. So, after having the model imported, and linked to the scene graph, we can set a position to it: self.platform.setPos(0,10,0)
This process is repeated to all objects we want to insert into the scene. At the end of this process, we will have a scene graph estructure like this:
ADVICE: mass around with object’s position, and it’s links:
– change the coordinates values in platform and wall objects;
– link the wall, to the platform: self.wallreparentTo(self.plataforma);
– change the coordinates again;
– link the platform to the wall, and change the coordinates again.
This will help you to understand better this subject in Panda3D.
Vetores & Física :: Gamedev receitas Panda3D
Baseado nos textos de Daniel Shiffman (http://www.shiffman.net/teaching/nature/)
Update – (26/10/2011):
Outros bons links com textos sobre vetores e jogos:
– Uso de vetores em jogos, por Vinícius Godoy de Mendonça; PontoV
– Uma breve explicação sobre vetores, por gamedevbrasil
Para realizar simulações de movimento em jogos, basicamente, basta fazer alterações das coordenadas de um dado objeto durante os ciclos de execução do programa, dessa forma então, cria-se a ilusão de animação.
Existem algumas formas clássicas para essa alteração de coordenadas:
– Apenas mudar os valores de coordenadas;
– Usar vetores;
– Simular cinemática;
– Simular Física;
Essas formas foram elencadas acima, com o intuito de criar uma espécia de linha evolutiva de complexidade. Isso não que dizer que a mais complexa é a mais útil que as demais, isso varia de projeto para projeto. Porém, é certo que as bases de um dos itens, influem sobre o seguinte.
Exemplo 1:
[code lang=”python”]
from direct.showbase.ShowBase import ShowBase
from direct.task import Task
class MyApp(ShowBase):
def __init__(self):
ShowBase.__init__(self)
self.taskMgr.add(self.funcaoDeTarefa, “Tarefa de teste”)
self.cubo = self.loader.loadModel(“box”);
self.cubo.reparentTo(self.render)
self.cubo.setScale(1)
self.cubo.setPos(-3,10,-2)
def funcaoDeTarefa(self, task):
print “A posicao do cubo e: “, self.cubo.getPos()
self.cubo.setX(self.cubo.getX()+0.01)
return Task.cont
app = MyApp()
app.run()
[/code]
Nesse exemplo, temos uma simples variação de valor de coordenadas do cubo. Observe que na função de tarefa (funcaoDeTarefa) o valor da coordenada ‘x’ do cubo é incrementada em 0.01 a cada execução da tarefa.
Exemplo 2:
[code lang=”python”]
from direct.showbase.ShowBase import ShowBase
from direct.task import Task
from pandac.PandaModules import Vec3
class MyApp(ShowBase):
def __init__(self):
ShowBase.__init__(self)
self.vector_left = Vec3(-0.01,0, 0)
self.vector_right= Vec3( 0.01,0, 0)
self.vector_up = Vec3( 0 ,0, 0.01)
self.vector_down = Vec3( 0 ,0,-0.01)
self.main_vec = Vec3(0,0,0)
self.taskMgr.add(self.funcaoDeTarefa, “Tarefa de teste”)
self.cubo = self.loader.loadModel(“box”);
self.cubo.reparentTo(self.render)
self.cubo.setScale(1)
self.cubo.setPos(-3,10,-2)
self.accept(‘d’, self.changeDirection, [self.vector_right])
self.accept(‘a’, self.changeDirection, [self.vector_left])
self.accept(‘w’, self.changeDirection, [self.vector_up])
self.accept(‘s’, self.changeDirection, [self.vector_down])
def changeDirection(self, direction):
self.main_vec = direction
def funcaoDeTarefa(self, task):
self.cubo.setPos(self.cubo.getPos()+self.main_vec)
return Task.cont
app = MyApp()
app.run()
[/code]
Neste segundo exemplo temos o uso de vetores para o deslocamento de um objeto.
Vejamos ver o uso dos vetores mais detalhadamente.
Vetores: ========================================
referências:
- baseado em Daniel Shiffman
- http://www.cienciamao.usp.br/tudo/exibir.php?midia=tex&cod=_vetores
- http://educar.sc.usp.br/fisica/vetores.html
Para animar um objeto em um espaço virtual, precisamos de uma maneira de armazenar a informação sobre a localização do objeto, movimento, etc. Num espaço de duas dimensões (como a nossa tela de computador), a localização é expressa por coordenadas X e Y – em um espaço de três dimensões, a localização é expressa por coordenadas X, Y e Z – Este par (ou trio) de informação é o elemento essencial para os sistemas que criaremos. Teremos “pontos” e “vetores”. Um ponto representa um local e um vetor representa o deslocamento entre dois pontos.
Considere um retângulo que se desloca através da tela. Em um dado instante tem a seguinte descrição:
[quote]
Posição – a localização do objeto, expressa em duas dimensões como um ponto.
Velocidade – a taxa na qual objeto muda de posição por unidade de tempo, expressa em duas dimensões do vetor.
Aceleração – a taxa na qual objeto muda a velocidade por unidade de tempo, expressa como um vetor de duas dimensões.
[/quote]
Obs.: Caso a descrição do espaço seja em três dimensões, os pontos e vetores envolvidos, devem ter também três dimensões.
Tecnicamente, a posição é um ponto; velocidade / aceleração são vetores. Para nossos propósitos, entretanto, vamos considerar todos os três como vetores para simplificar a nosso código. Examine o seguinte pseudo código. Suponha três vetores: aceleração, velocidade e localização. Este algoritmo simples será a base para os nossos exemplos.
[quote]
velocidade = velocidade + aceleração
Localização = localização + velocidade
Desenha a coisa na localização
[/quote]
Uma vez que vetores representam pares de valores, não podemos simplesmente usar a adição ou multiplicação tradicional. Em vez disso, precisaremos fazer operações com vetores.
Felizmente as game engines nos fornecem comandos para simplificar essas operações.
Então na prática, podemos dizer que um vetor armazena informações de:
– posicionamento (coordenadas)
– direção
– intensidade (comprimento)
Todas essas informações, e operações que os vetores nos fornecem, fazem os vetores serem tão populares no desenvolvimento de jogos; Pois são muito úteis e práticos para as simulações, sejam simulações de deslocamento de objetos, ou simulações de física, ou ainda, em simulações de comportamentos, por que vetores são formas de expressar matematicamente movimentos. Como dito anteriormente, eles armazenam informações de direção, intensidade (comprimento do vetor) e posicionamento; Como se não o bastasse, existem as chamadas “operações vetoriais” que são operações matemáticas feitas com vetores, e as mesmas são muito úteis.
Talvês o exemplo mais comum seja a subtração de vetores. Podemos usá-la para fazer com que um objeto siga outro (Para maiores detalhes matemáticos sobre subtração de vetores, veja os links selecionados nas referências.), a mágica acontesse porque, quando subtraímos um vetor A, por um vetor B, o resultado é um vetor C, que parte do vetor A, até o vetor B, assim temos no vetor C, a direção, e a distância entre A e B.
Observe o exemplo abaixo. Temos uma esfera que percorre o caminho entre os cubos. Todo esse trabalho acontesse na função update da esfera.
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
from direct.showbase.ShowBase import ShowBase
from direct.showbase.DirectObject import DirectObject
from direct.task import Task
from pandac.PandaModules import *
class Cubo(DirectObject):
loc = Vec3(0,0,0)
vel = Vec3(0,0,0)
acc = Vec3(0,0,0)
mass = 1;
maxVel = 1;
def __init__(self, pos):
self.loc = pos
self.carregaModelos()
def carregaModelos(self):
self.cubo = loader.loadModel(‘box’)
self.cubo.setPos(self.loc)
self.cubo.reparentTo(render)
# Class smiley ————————————
class Smiley(DirectObject):
loc = Vec3(0,0,1)
vel = Vec3(0,0,0)
acc = Vec3(0,0,0)
mass = 1
maxForca = 0.1
def __init__(self, pathToFollow):
self.carregaModelos()
self.way = pathToFollow
self.nextIt = 1;
self.next = self.way[1].loc
print “next pos: “, self.next
def carregaModelos(self):
self.smiley = loader.loadModel(‘smiley’)
self.smiley.setPos(self.loc)
self.smiley.reparentTo(render)
def update(self):
target = self.next
direction = target – self.loc
distancia = direction.length()
direction.normalize()
direction *= self.maxForca
self.loc += direction
if(distancia = len(self.way) ):
self.nextIt=0
self.next = self.way[self.nextIt].loc
self.smiley.setPos(self.loc)
#Classe do jogo —————————————
class MyApp(ShowBase):
def __init__(self):
ShowBase.__init__(self)
self.box0 = Cubo(Vec3(0,0,1))
self.box1 = Cubo(Vec3(10,0,1))
self.box2 = Cubo(Vec3(5,10,1))
self.box3 = Cubo(Vec3(-10,10,1))
self.box4 = Cubo(Vec3(-10,-5,1))
self.box5 = Cubo(Vec3(0,-10,1))
self.wayPoints = (self.box0, self.box1, self.box2, self.box3, self.box4, self.box5)
self.smileyForca = 0.5
self.smiley = Smiley(self.wayPoints)
#Codigo para o piso
self.cm = CardMaker(“ground”)
self.cm.setFrame(-20, 20, -20, 20)
self.ground = render.attachNewNode(self.cm.generate())
self.ground.setPos(0, 0, 0)
self.ground.lookAt(0, 0, -1)
self.taskMgr.doMethodLater(4, self.update, “update task”)
# Set the camera position
base.disableMouse()
base.camera.setPos(15, -30, 20)
base.camera.lookAt(0, 0, 0)
self.fiatLux()
def update(self, task):
self.smiley.update()
return Task.cont
def fiatLux(self):
# Directional light 01
self.directionalLight = DirectionalLight(‘directionalLight’)
self.directionalLight.setColor(Vec4(0.95, 0.95, 0.8, 1))
self.directionalLightNP = render.attachNewNode(self.directionalLight)
# This light is facing backwards, towards the camera.
self.directionalLightNP.setHpr(45, -15, 0)
render.setLight(self.directionalLightNP)
game = MyApp()
run()
[/code]
CINEMÁTICA ===========================================
Para começar vejamos uma simulação de cinemática. Cinemática é a um ramo da física clássica que se ocupa da descrição dos movimentos dos corpos, sem se preocupar com a análise de suas causas.
Exemplo 3:
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
from direct.showbase.ShowBase import ShowBase
from direct.showbase.DirectObject import DirectObject
from direct.task import Task
from pandac.PandaModules import Vec3
class Cubo(DirectObject):
loc = Vec3(0,30,0)
vel = Vec3(0,0,0)
acc = Vec3(0,0,0)
def __init__(self):
self.carregaModelos()
def carregaModelos(self):
self.cubo = loader.loadModel(‘box’)
self.cubo.setPos(self.loc)
self.cubo.reparentTo(render)
def update(self):
self.vel += self.acc
self.loc += self.vel
self.cubo.setPos(self.loc)
self.acc *= 0
class MyApp(ShowBase):
def __init__(self):
ShowBase.__init__(self)
self.vector_left = Vec3(-0.01,0, 0)
self.vector_right= Vec3( 0.01,0, 0)
self.vector_up = Vec3( 0 ,0, 0.01)
self.vector_down = Vec3( 0 ,0,-0.01)
self.taskMgr.add(self.funcaoDeTarefa, “Tarefa de teste”)
self.box = Cubo()
self.accept(‘d’, self.changeDirection, [self.vector_right])
self.accept(‘a’, self.changeDirection, [self.vector_left])
self.accept(‘w’, self.changeDirection, [self.vector_up])
self.accept(‘s’, self.changeDirection, [self.vector_down])
def changeDirection(self, direction):
self.box.acc += direction
def funcaoDeTarefa(self, task):
self.box.update()
return Task.cont
app = MyApp()
app.run()
[/code]
Neste exemplo, temos duas classes, a classe do Cubo, e outra da aplicação. A classe Cubo, possui as informações para o comportamento do cubo, os vetores de localização, velocidade e aceleração, e a rotina de atualização (descrita anteriormente) :
[quote]
velocidade = velocidade + aceleração
Localização = localização + velocidade
Desenha a coisa na localização
aceleração = aceleração * 0
[/quote]
Essa pequena rotina, é descrita pelas regras de cinemática, e usada na aplicação da segunda lei de Newton. Basicamente, a aceleração é o vetor que direciona o objeto. Quando a aceleração muda de direção, com o tempo, o objeto também muda de direção.
Depois de observada as bases da cinemática, temos duas formas de aplicações que derivam das mesmas bases: Física e comportamentos de movimentos(Inteligência Artificial para Games.)
Física ========================================
É plenamente possível realizar os cálculos necessários para simulação de física, porém esse é um tópico de alta complexidade. E para simplificar o trabalho, existem softwares especializados nesses cálculos, são as chamadas “engines de física”. No Panda3D, a mais usada é a ODE.
Essas engines de física, realizão os cálculos de simulação de forças, colisões, “juntas”, e outras fórmulas de física mecânica, e já atualizam a exibição dos objetos (só para Unity3D. No Panda3D é necessário colocar a atualização dos dados em uma tarefa ).
Exemplo 4:
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
from direct.showbase.ShowBase import ShowBase
from direct.showbase.DirectObject import DirectObject
from direct.task import Task
from pandac.PandaModules import *
class MyApp(ShowBase):
def __init__(self):
ShowBase.__init__(self)
self.fiatLux()
#Cria o mundo de fisica
self.world = OdeWorld()
self.world.setGravity(0,0,-9.81)
#estabelece configuracoes de reacao
self.world.initSurfaceTable(1)
self.world.setSurfaceEntry(0, 0, 150, 0.0, 9.1, 0.9, 0.00001, 0.0, 0.002)
#cria um ‘espaco’ para colisoes automaticas
self.space = OdeSimpleSpace()
self.space.setAutoCollideWorld(self.world)
self.contactgroup = OdeJointGroup()
self.space.setAutoCollideJointGroup(self.contactgroup)
#Codigo para o piso
self.cm = CardMaker(“ground”)
self.cm.setFrame(-20, 20, -20, 20)
self.ground = render.attachNewNode(self.cm.generate())
self.ground.setPos(0, 0, 0); self.ground.lookAt(0, 0, -1)
self.groundGeom = OdePlaneGeom(self.space, Vec4(0, 0, 1, 0))
#cria renderizacao de um cubo
self.box = loader.loadModel(‘../assets/eggs/box_c.egg’)
self.box.reparentTo(render)
self.box.setPos(0,9.5,7)
self.box.setHpr(5,35,57)
#self.box.setScale(1)
self.box.setColor(0.5, 0.5, 0.5, 1)
#cria um ‘body’ para representar o cubo no universo de fisica
self.boxBody = OdeBody(self.world)
self.boxMass = OdeMass()
self.boxMass.setBox(100,1,1,1)
self.boxBody.setMass(self.boxMass)
self.boxBody.setPosition(self.box.getPos(render))
print self.box.getQuat(render)
self.boxBody.setQuaternion(self.box.getQuat(render))
print self.boxBody.getQuaternion()
#cria um solido de colisao para realizar as colisoes no universo de fisica
self.boxGeom = OdeBoxGeom(self.space, 2,2,2)
self.boxGeom.setBody(self.boxBody)
# Set the camera position
base.disableMouse()
base.camera.setPos(40, 40, 20)
base.camera.lookAt(0, 0, 0)
self.taskMgr.doMethodLater(4, self.update, “update task”)
def update(self, task):
#obrigatorio
self.space.autoCollide()
self.world.quickStep(globalClock.getDt())
#atualiza a renderizacao do cubo, com base nas atualizacoes da fisica
self.box.setPosQuat(render, self.boxBody.getPosition(), Quat(self.boxBody.getQuaternion()))
#obrigatorio qdo houver colisoes
self.contactgroup.empty()
return Task.cont
def fiatLux(self):
# Directional light 01
self.directionalLight = DirectionalLight(‘directionalLight’)
self.directionalLight.setColor(Vec4(0.95, 0.95, 0.8, 1))
self.directionalLightNP = render.attachNewNode(self.directionalLight)
# This light is facing backwards, towards the camera.
self.directionalLightNP.setHpr(45, -15, 0)
render.setLight(self.directionalLightNP)
game = MyApp()
run()
[/code]
No exemplo acima, temos uma cena bem simples onde um cubo, cai sobre um plano. O código exibe a forma básica de configuração de elementos de jogo, com a integração de simulações realizadas pela engine de física. No Panda3D, a engine ODE é a padrão, mas nada impede de utilizar outras; No Unity3D, a engine padrão é a Physx.
Além de simular a força da gravidade agindo sobre objetos, podemos também fazer com que “forças” atuem sobre nosso objeto, como acontece em situações como: um chute em uma bola; um arremesso de uma pedra; o impacto de uma explosão, etc. Veja a aplicação de uma força simples:
[code lang=”python”]
from pandac.PandaModules import loadPrcFileData
loadPrcFileData(”,’show-frame-rate-meter 1′)
from direct.showbase.ShowBase import ShowBase
from direct.showbase.DirectObject import DirectObject
from direct.task import Task
from pandac.PandaModules import *
class MyApp(ShowBase):
def __init__(self):
ShowBase.__init__(self)
self.fiatLux()
#Cria o mundo de fisica
self.world = OdeWorld()
self.world.setGravity(0,0,-9.81)
#estabelece configuracoes de reacao
self.world.initSurfaceTable(1)
self.world.setSurfaceEntry(0, 0, 150, 0.0, 9.1, 0.9, 0.00001, 0.0, 0.002)
#cria um ‘espaco’ para colisoes automaticas
self.space = OdeSimpleSpace()
self.space.setAutoCollideWorld(self.world)
self.contactgroup = OdeJointGroup()
self.space.setAutoCollideJointGroup(self.contactgroup)
#Codigo para o piso
self.cm = CardMaker(“ground”)
self.cm.setFrame(-20, 20, -20, 20)
self.ground = render.attachNewNode(self.cm.generate())
self.ground.setPos(0, 0, 0); self.ground.lookAt(0, 0, -1)
self.groundGeom = OdePlaneGeom(self.space, Vec4(0, 0, 1, 0))
#cria renderizacao de um cubo
self.box = loader.loadModel(‘../assets/eggs/box_c.egg’)
self.box.reparentTo(render)
self.box.setPos(0,9.5,7)
self.box.setHpr(5,35,57)
#self.box.setScale(1)
self.box.setColor(0.5, 0.5, 0.5, 1)
#cria um ‘body’ para representar o cubo no universo de fisica
self.boxBody = OdeBody(self.world)
self.boxMass = OdeMass()
self.boxMass.setBox(100,1,1,1)
self.boxBody.setMass(self.boxMass)
self.boxBody.setPosition(self.box.getPos(render))
self.boxBody.setQuaternion(self.box.getQuat(render))
#cria um solido de colisao para realizar as colisoes no universo de fisica
self.boxGeom = OdeBoxGeom(self.space, 2,2,2)
self.boxGeom.setBody(self.boxBody)
# Set the camera position
base.disableMouse()
base.camera.setPos(40, 40, 20)
base.camera.lookAt(0, 0, 0)
#captura entrada de teclado
self.accept(‘f’, self.aplicaForca)
self.taskMgr.doMethodLater(4, self.update, “update task”)
def update(self, task):
#obrigatorio
self.space.autoCollide()
self.world.quickStep(globalClock.getDt())
#atualiza a renderizacao do cubo, com base nas atualizacoes da fisica
self.box.setPosQuat(render, self.boxBody.getPosition(), Quat(self.boxBody.getQuaternion()))
#obrigatorio qdo houver colisoes
self.contactgroup.empty()
return Task.cont
def fiatLux(self):
# Directional light 01
self.directionalLight = DirectionalLight(‘directionalLight’)
self.directionalLight.setColor(Vec4(0.95, 0.95, 0.8, 1))
self.directionalLightNP = render.attachNewNode(self.directionalLight)
# This light is facing backwards, towards the camera.
self.directionalLightNP.setHpr(45, -15, 0)
render.setLight(self.directionalLightNP)
def aplicaForca(self):
print “aplica forca!”
print self.boxBody.getMass()
self.boxBody.setForce(100000,0,0)
game = MyApp()
run()
[/code]
Arquivos para tutorial Panda3D
Abaixo você vai achar os arquivos para os tutoriais de Panda3D
Panda-project (15Mb formato .zip)
Organização dos arquivos.
Para que os arquivos de código e os arquivos de assets (modelos, animações e texturas) funcionem como o esperado, é necessário que eles sejam organizados de forma estruturada, seguindo o seguinte esquema:
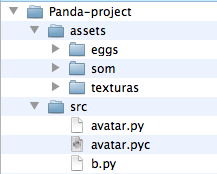
Neste esquema, a pasta principal do projeto deve ser a pasta Panda-project.
Como “filhas” da pasta Panda-project, temos as pastas assets e src. A pasta assets, irá abrigar os arquivos de arte para o projeto, ou seja, os modelos, texturas, animações, etc. Para tanto a pasta assets possui outras três subpastas eggs, som e texturas.
A pasta src (src refere-se a source) é onde devemos salvar os arquivo e código, que vc encontrará durante os tutoriais, sempre salvar com extensão .py.